Le robot, une force inarrêtable
Finalement, après plusieurs jours, il trouve l'arme parfaite: un robot. Cette force incommensurable mettra définitivement fin au règne maléfique des méchants. Cependant, pour cela, il doit trouver des individus aux capacités surhumaines qui lui permettront de construire ce robot. Il a donc fait appel aux Marcy Spider-Women de différents univers et a réuni l'équipe parfaite.
LA BASE
La base du robot est composée d'un train d'entraînement holonomique qui relie les quatre roues. Chacun de leurs axes est fixé à de multiples extrusions à l'aide de roulements. Les moteurs sont placés à l'arrière de la base afin d'optimiser l'espace à l'avant pour les autres composants du robot, tels que le bras et le réservoir. Pour que les moteurs fonctionnent en correspondance avec chaque roue, nous les avons attachés à des pignons et des chaînes. En outre, la base est suffisamment haute pour pouvoir rouler confortablement sur les pièces de jeu, ce qui nous donne une plus grande maniabilité sur le terrain.
.jpg)
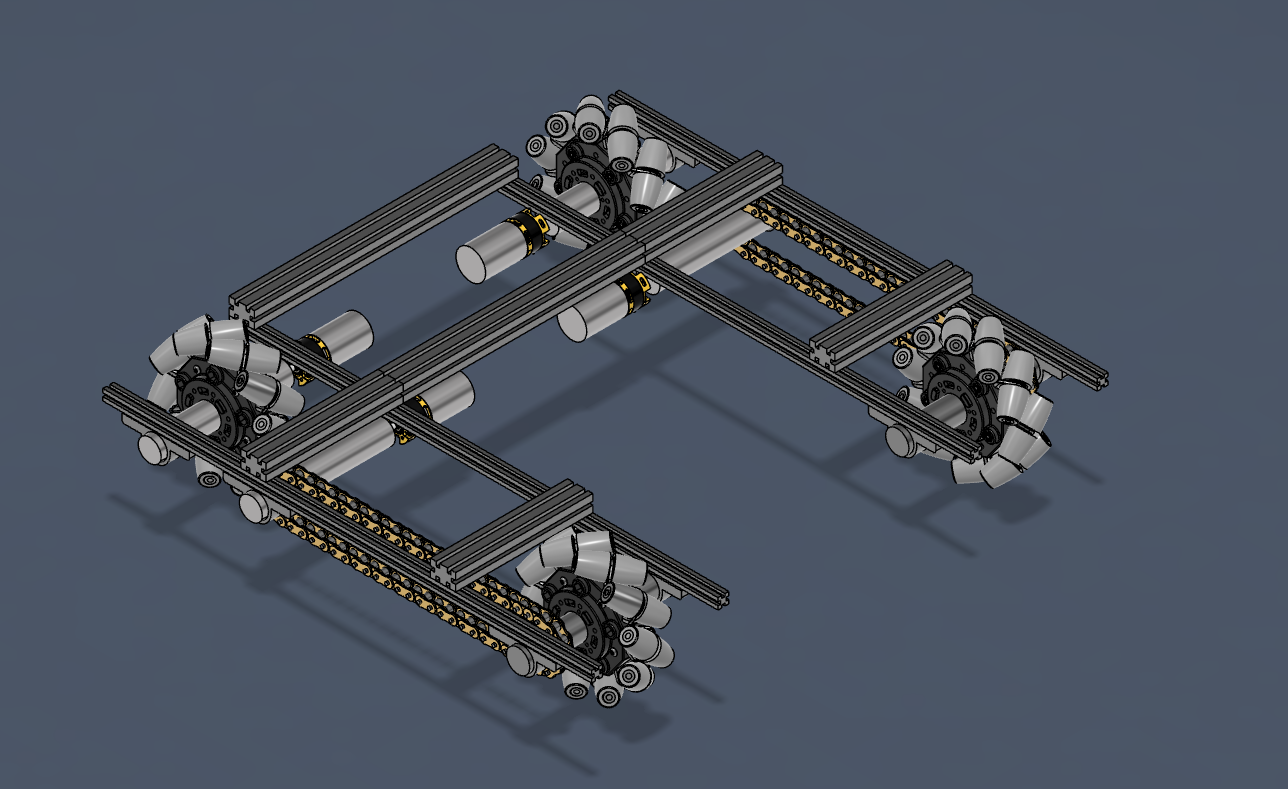
Tony Stark a demandé aux filles de s'assurer qu'elles utilisent des roues Mecanum pour garantir une bonne mobilité du robot. En effet, ces roues permettent de dé placer le robot d'un côté à l'autre et d'avant en arrière.
LE BRAS
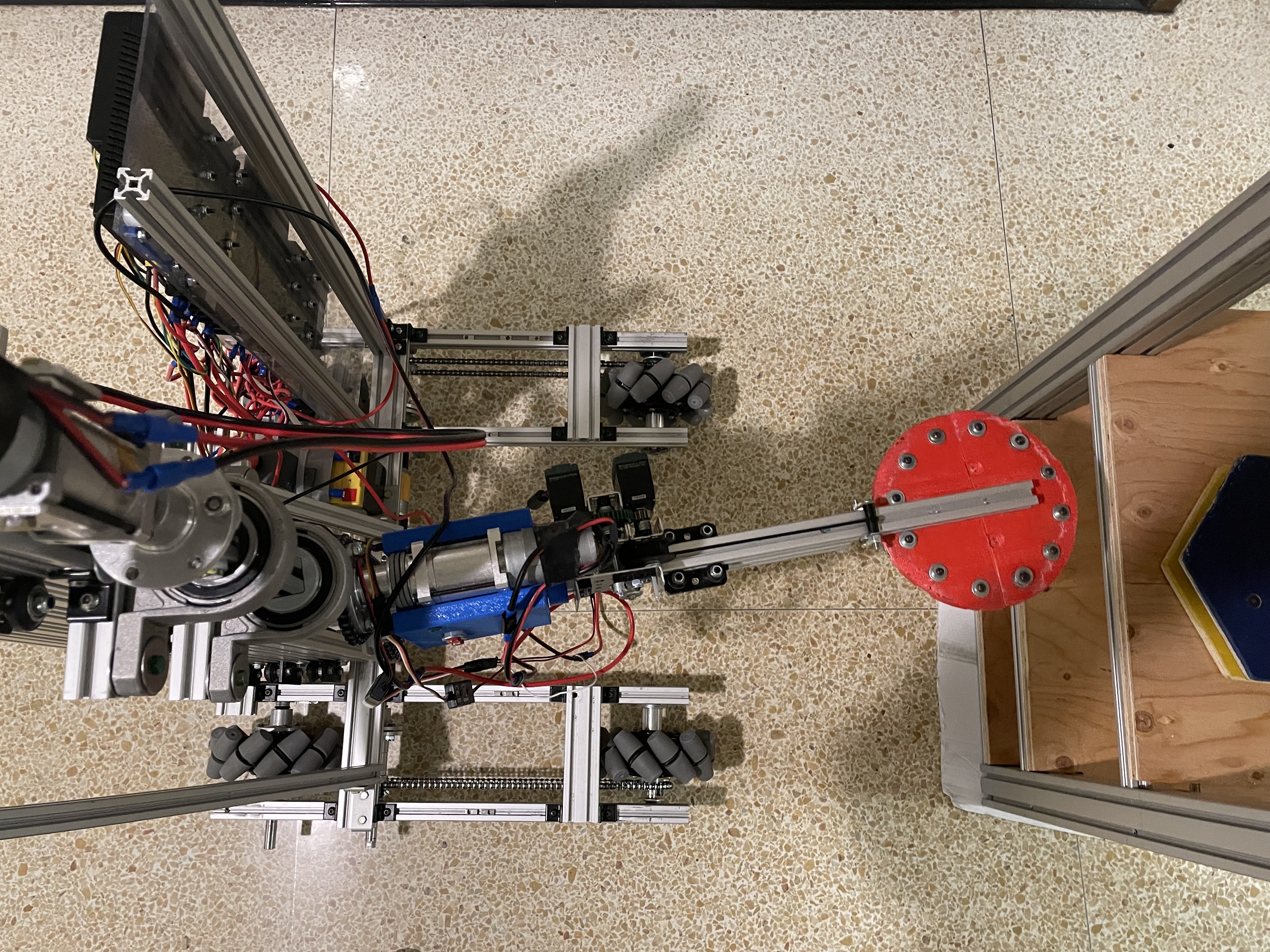
Le bras est compos éde plusieurs extrusions, de deux moteurs, de deux servomoteurs et d'un disque magnétique. Le disque est fixé à un profilé qui est relié à un moteur à l'aide de chaînes et de pignons. Les deux sont maintenus ensemble par une pièce imprimée en 3D. L'extrusion est attachée à une autre extrusion qui effectue également une rotation. Lorsqu'ils fonctionnent ensemble, les deux moteurs permettent de déplacer le disque magnétique verticalement et horizontalement. Le disque est composé de douze aimants qui sont capables de saisir une piéce de jeu grâce à ses vis métalliques. Pour la libérer, il y a une extrusion qui la propulse vers l'avant, à l'aide de deux servomoteurs. Plus précisément, ces servomoteurs génèrent la rotation d'une roue qui enroule une ficelle autour d'elle. La ficelle déclenche alors le mouvement de translation de l'extrusion, qui pousse la pièce de jeu vers l'extérieur. Cela nous permet de déposer des pièces de jeu dans la tour directement à distance.
LE M&ECHANISME DE RETOURNEMENT
Ce profilé métallique est relié à l'un des moteurs de la base et a pour mission de retourner les pièces du jeu dans la couleur souhaitée. Chaque fois que le robot avance, ce mécanisme se déclenche automatiquement et le flipper commence à tourner. Si un hexagone se trouve au bon endroit, il effectue une rotation complète de 180 degrés et tombe du bon côté.
Le réservoir:
Le réservoir est une pièce en plastique polycarbonate fixée à l'avant de la base. Il a pour mission d'encercler la pile d'hexagones située devant le robot. De cette façon, la pile est maintenue en sécurité et peut être traînée sur le terrain. De même, cela nous permet d'avoir un maximum de pièces de jeu en notre possession. Quel grand gain de temps ! De plus, le robot étant équipé de ce composant spécial n'aura pas besoin de recommencer une nouvelle trajectoire pour aller chercher de nouvelles pièces de jeu à chaque fois.
L'ascenseur :
Le robot est également équipé d'un ascenseur qui se compose de cinq extrusions d'aluminium, dont quatre sont doubles. Huit rouleaux sont fixés aux profilés, quatre en haut et quatre en bas. à côté de chaque rouleau, il y a une petite poulie qui guide le mouvement d'une corde. En effet, tout ce mécanisme est contrôlé par cette unique corde reliée au moteur de l'ascenseur. Lorsque le moteur est activé, il utilise un système de courroie et de poulie pour élever les extrusions d'aluminium de plus en plus haut jusqu'à ce qu'elles atteignent la cinquième et dernière pièce. Cela permet à l'élvéateur de fonctionner en douceur et efficacement.
METTONS-LE EN MARCHE!
Tout au long de la compétition, les programmeurs ont travaillé sans relâche pour résoudre les nombreux dilemmes. En effet, ils ont passé d'innombrables heures à essayer de détecter les zones défectueuses dans leurs lignes de code afin de comprendre pourquoi le robot émettait un bip. De plus, ils ont rencontré un problème avec le contrôleur du moteur qui ne fonctionnait pas correctement. Après plusieurs tentatives, ils ont découvert qu'ils avaient utilisé la mauvaise couleur de fusible dans la boîte à fusibles qui est finalement connectée à la fonction moteur.